Interactive Soft Tissue for Surgical Simulation
My thesis was the research and development of new tech for the simulation of surgically interactive virtual tissues. It includes haptic-rendering (making it into something you can touch/feel), novel medical training simulation applications, and reviews of the related tech, hardware, and the research area more generally.
Download thesis as a PDF (from ResearchGate, 4MB).

Abstract
Medical simulation has the potential to revolutionize the training of medical practitioners. Advantages include reduced risk to patients, increased access to rare scenarios and virtually unlimited repeat-ability. However, in order to fulfill its potential, medical simulators require techniques to provide realistic user interaction with the simulated patient. Specifically, compelling real-time simulations that allow the trainee to interact with and modify tissues, as if they were practicing on real patients.
A key challenge when simulating interactive tissue is reducing the computational processing required to simulate the mechanical behavior. One successful method of increasing the visual fidelity of deformable models while limiting the complexity of the mechanical simulation is to bind a coarse mechanical simulation to a more detailed shell mesh. But even with reduced complexity, the processing required for real-time interactive mechanical simulation often limits the fidelity of the medical simulation overall. With recent advances in the programmability and processing power of massively parallel processors such as graphics processing units (GPUs), suitably designed algorithms can achieve significant improvements in performance.
This thesis describes an ablatable soft-tissue simulation framework, a new approach to interactive mechanical simulation for virtual reality (VR) surgical training simulators that makes efficient use of parallel hardware to deliver a realistic and versatile interactive real-time soft tissue simulation for use in medical simulators.
“Mr. Ruthenbeck proceeded very carefully and skillfully in the development of the approaches presented in his thesis. He showed a thorough background in the related research areas.”
“The presented thesis constitutes a valuable contribution to the field of interactive surgery simulators”.
1.1 Thesis Aims
1.2 Thesis Outline
Chapter 2. Virtual Reality for Medical Training
2.1 Learning Modalities
2.2 VR Medical Simulations: The State of the Art
Chapter 3. Simulator Development Tools
3.1 Software Tools
3.2 Literature Surveys
3.3 Recent Advances in Parallel Computing Hardware
3.4 Conclusion
Chapter 4. A New Tissue Simulation Framework
4.1 The Tissue Simulation Framework
4.2 System Overview
Chapter 5. Mechanical Simulation
5.1 Background
5.2 Cubic Rotational Mass Springs: A New Approach
5.3 Demonstration
5.4 Extensibility
Chapter 6. Interactive Marching Tetrahedra
6.1 A Review of Marching Algorithms
6.2 Marching Tetrahedra
6.3 Interactive Marching Tetrahedra: A New Approach
6.4 Demonstration
Chapter 7. Integration of Components
7.1 Deforming the IMT Mesh
7.2 Cuts and the Coupled System
7.3 Collisions
7.4 Demonstration
Chapter 8. Haptics
8.1 6DOF Haptics
8.2 Desktop Haptic Devices
8.3 Haptics APIs
8.4 Haptic Rendering
8.5 Haptics in the TSF
8.6 Demonstration
Chapter 9. Applications
9.1 An Endoscopic Sinus Surgery Simulator
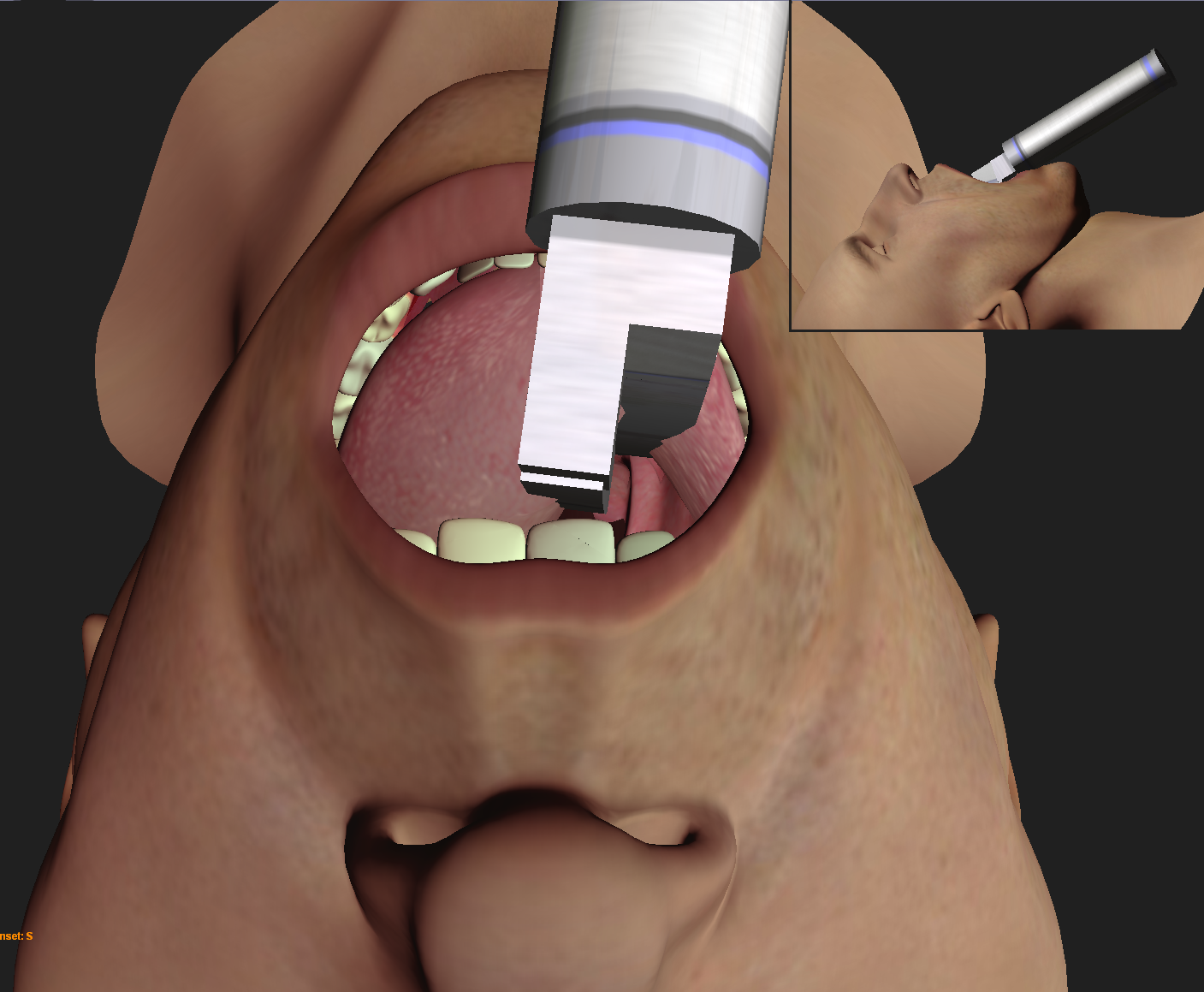
9.2 ISim: An Endotracheal Intubation Simulator
9.3 A Coblation Tonsillectomy Simulator
Chapter 10. Conclusion
10.1 Future Directions
10.2 Final Words
Bibliography
Appendix A: Mesh Coupler C++ Code Listing
Appendix B: An Earlier Version of ISim
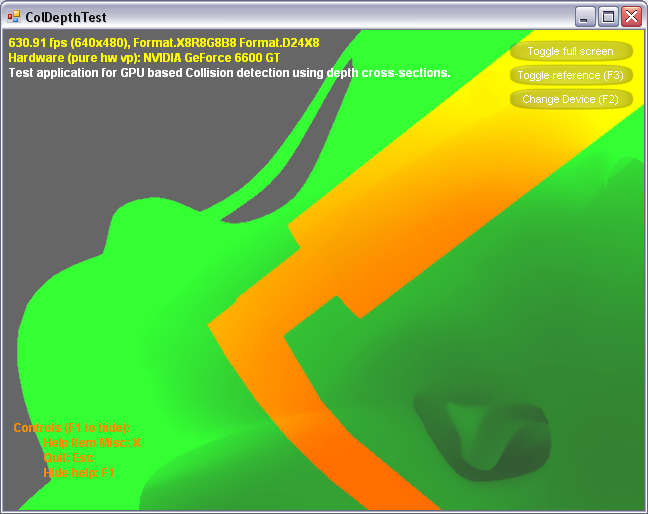
B.1 Image-based Collision Detection and Deformation
This intubation simulation is one of 3 medical simulators that I built during my PhD (see Chapter 10).
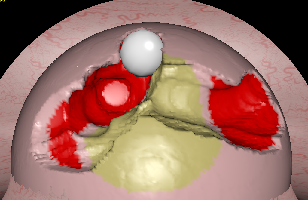
Creating virtual soft materials that can be cut in real-time requires several complex components to work together. The graphics processing unit (GPU) was used to make this possible using the CUDA API from Nvidia.
Another demo of the real-time cut-able virtual tissue system that I developed.
An early sinus surgery simulator prototype that demonstrates one of the cut-able virtual tissue systems that I developed.